Optical glass surface inspection robot/Robin
![]()
![]()
| A robot that detects defects on the glass surface and assigns them to trays. |
| Features |
| The principle of our low-angle lighting LA-0 is applied to the inspection of transparent workpieces and specular reflection workpiece surfaces. |
| The robot grips the workpiece and changes the irradiation angle of the illumination light. |
| After picking up workpieces from the pre-inspection tray and inspecting them for defects, the robot sorts them into non-defective trays and defective trays. |
| It is a robot that can be introduced while maintaining the traditional visual inspection environment. |
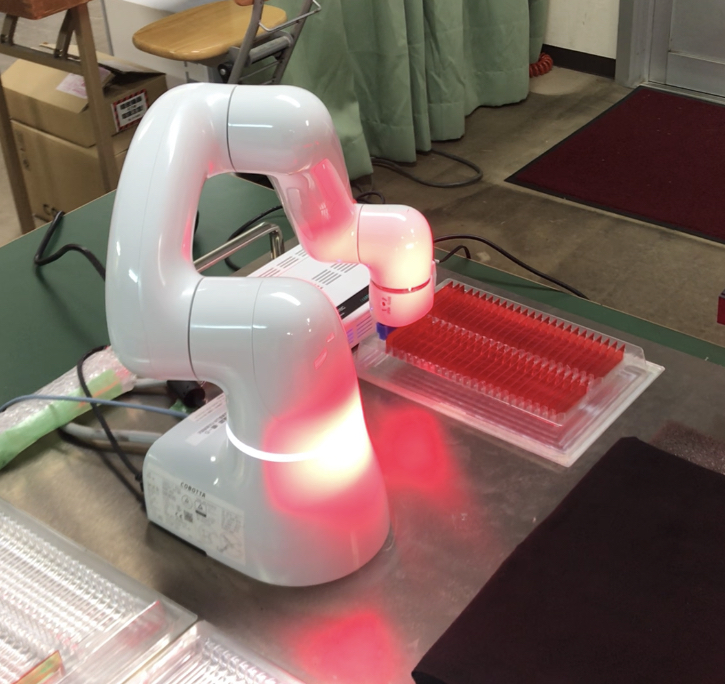 Picking up workpiece from the tray.
Picking up workpiece from the tray.
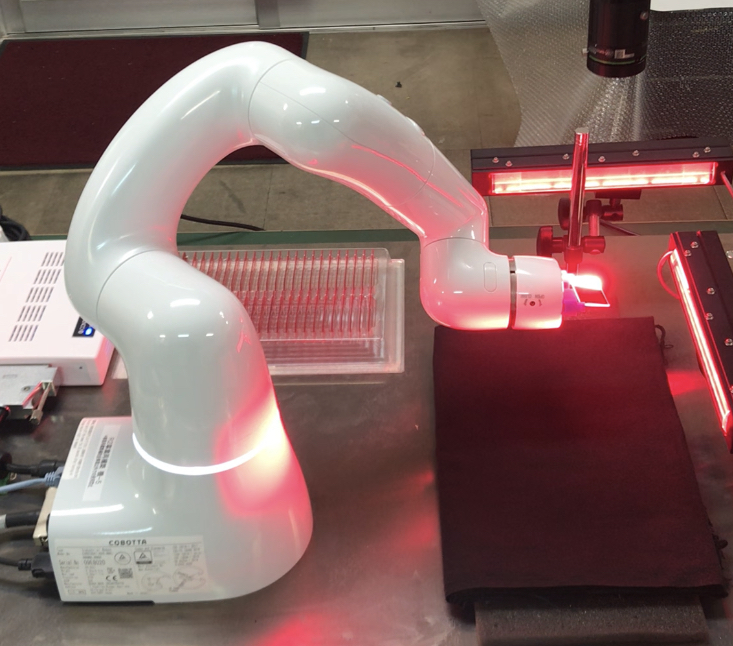
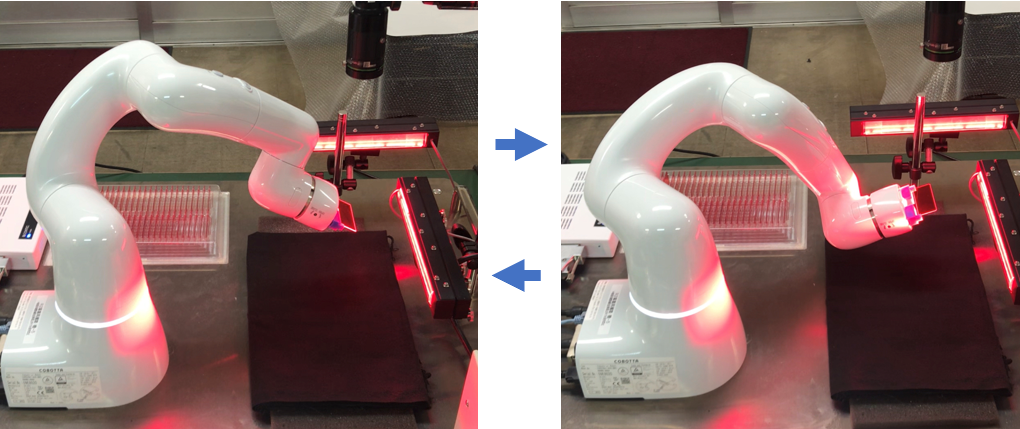 Changes the irradiation angle for the image processing.
Changes the irradiation angle for the image processing.
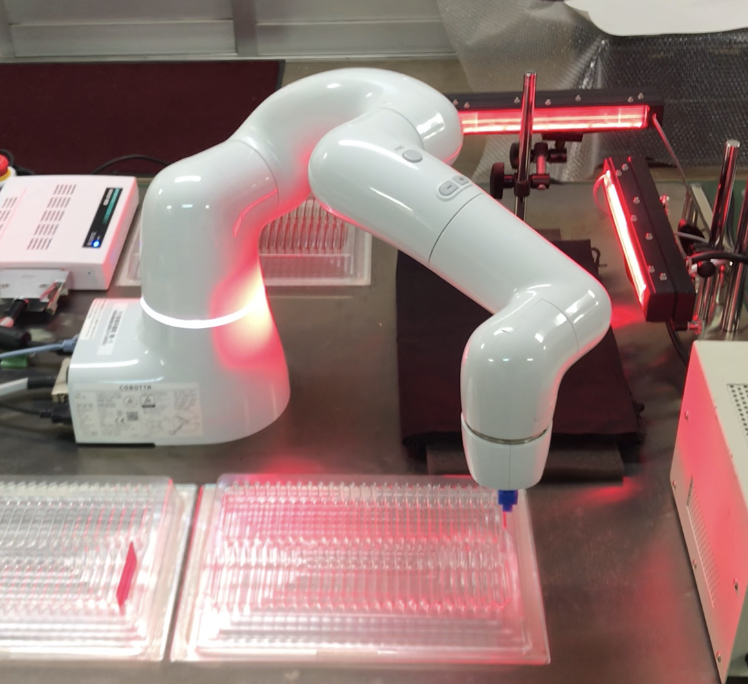 Transport to the designated trays.
Transport to the designated trays.
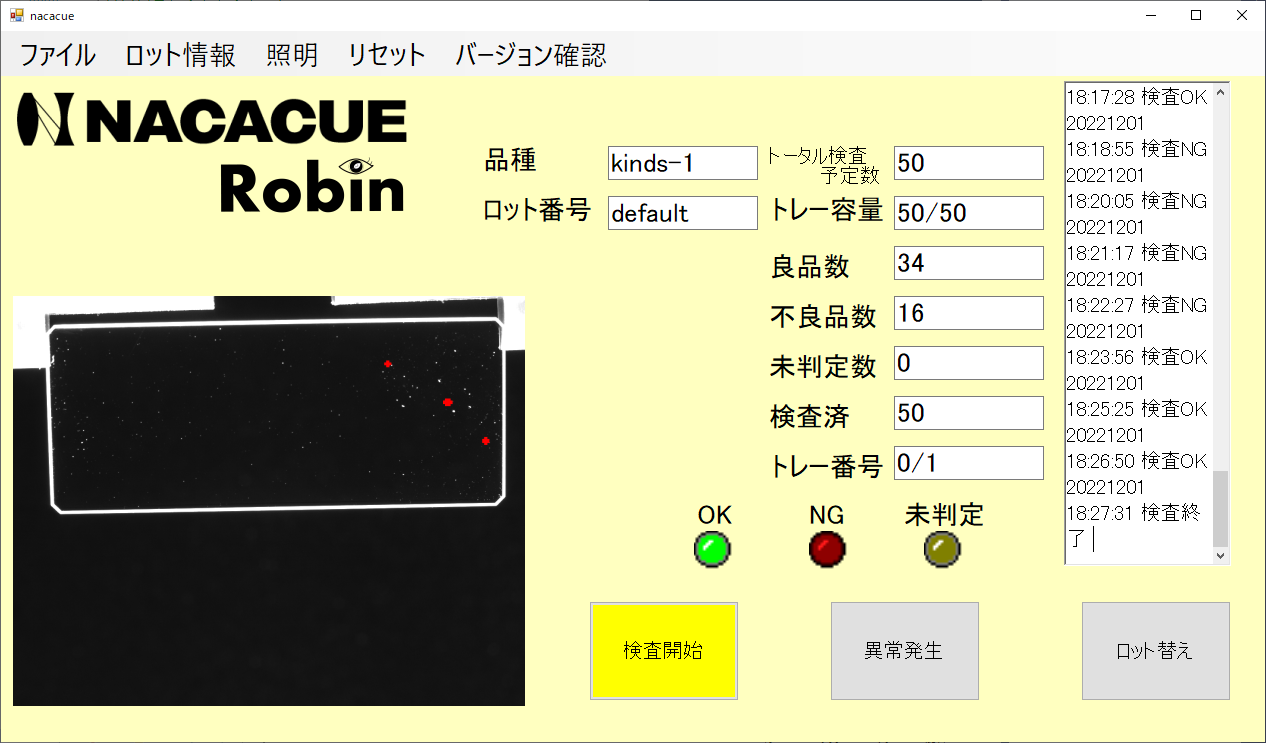 Operation panel
Operation panel
| System configuration |
| Robot:Cobotta DENSO |
| Camera:STC-MBE132U3V OMRON SENTECH |
| LENS:CF25ZA-1S FUJINON |
| Illumination:Low Angle Illumination LA-0 NACACUE |
| Light Power Supply:NPL-1 NACACUE |
| I/O Device:DIO-1616BX-USB CONTEC |
| Control Device:Windows10PC with Robin FW NACACUE |
| InspectionObjects |
| At optical glass |
| Scratches,Digs,Bubbles,Coat missing, etc. |
Specifications are subject to change without prior notice.